RTK GNSS модуль для БПЛА EMLID Reach M2/ M+
{kind=link}
{kind=link}
{kind=link}
RTK GNSS модуль для БПЛА EMLID Reach M2/ M+
- Описание
- Характеристики
- Комплектация
Геодезия и картография с использованием метода PPK: сантиметровая точность при меньшем количестве опорных точек
Когда синхронизация камеры действительно важна
Автопилот привязывает положение БПЛА к системе координат в реальном времени. Однако при движении дрона со скоростью 20 м/с и обновлении с частотой 5 Гц позиция уточняется каждые 4 метра. Это достаточно для выполнения полёта, но не обеспечивает необходимую точность для геодезии и картографии — задержка слишком велика для определения координат снимка.
Reach уменьшает задержку
Reach решает проблему позиционирования: бортовой модуль подключается непосредственно к камере через специальный адаптер и синхронизируется с затвором. Время и координаты каждого фото записываются с задержкой менее микросекунды. Такой метод использует опорные точки только для проверки точности позиционирования.
Четыре простых шага для точной топографической съёмки
|
|
|
|
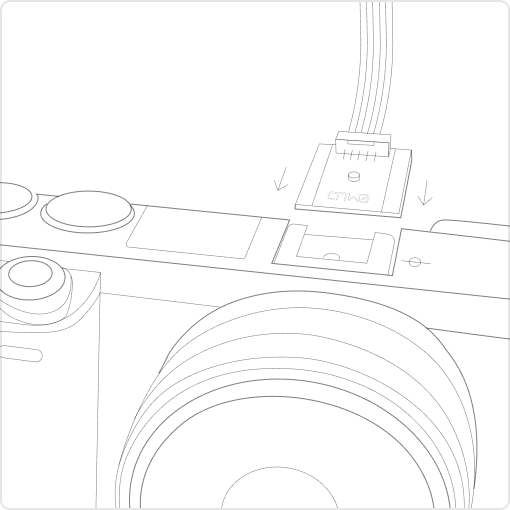
1. Подключите Reach к разъёму башмака камеры При съёмке каждого кадра электромагнитный импульс поступает на разъём башмака камеры синхронно со срабатыванием затвора. |
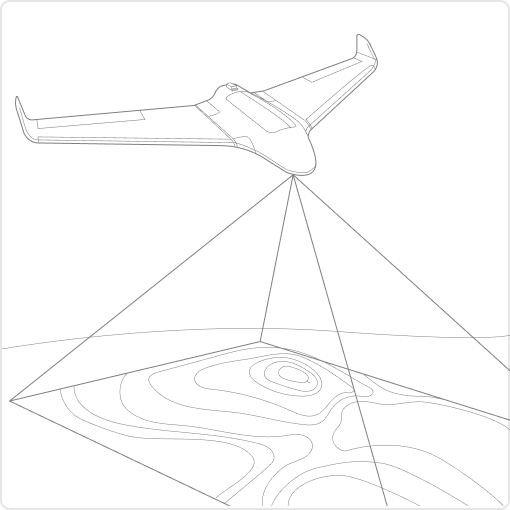
2. Выполните полёт на дроне и сделайте снимки Reach запишет данные о каждом снимке с задержкой менее микросекунды. Необработанные данные собираются в файл RINEX, который хранится во внутренней памяти модуля. |
|
|
|
|
|
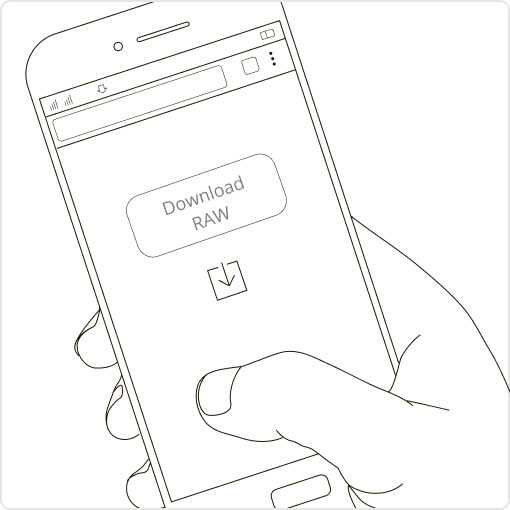
3. Скачайте логи с бортового модуля и наземного приёмника После выполнения полёта скачайте файлы RINEX с ботового модуля и наземной базовой станции (Reach серии RS, CORS или другого приёмника). |
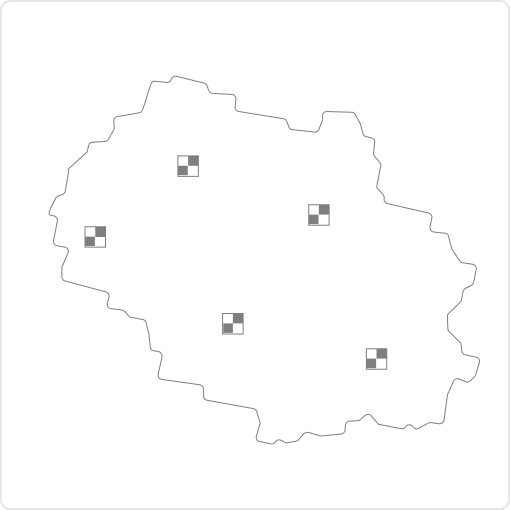
4. Обработайте логи и получите файл с геотегами фотографий Обработайте файлы RINEX, используя бесплатное программное обеспечение RTKLIB. Полученный файл с точными координатами фотоснимков может использоваться для их геопривязки, построения ортофотопланов и 3D-моделей. |
Использование подключения по протоколу NTRIP или приёмника Reach как базовой станции

Для обеспечения сантиметровой точности требуется подключение к базовой станции. Для этой цели вы можете воспользоваться NTRIP-сервисом или вторым приёмником Reach. Также поддерживается VRS.
Совместимость
Reach M2 и M+ работают совместно с ГНСС-приёмиками Reach по любому их доступных протоколов связи, либо с базовыми станциями, поддерживающими протоколы RCTM3 и NTRIP.
Reach M2 или M+: выберите вариант, оптимальный для ваших целей
|
Reach M+ и Reach RS+ Оптимальный выбор для работы на небольшом расстоянии от базовой станции. |
Reach M2 и Reach RS2 Быстрая привязка и надёжное соединение на большом удалении от базовой станции. |
|
|
M+ и RS+ |
M2 и RS2 |
|
RTK |
До 10 км |
До 60 км |
|
PPK |
До 20 км |
До 100 км |
|
Время |
1-2 мин |
5 с |
|
Частоты |
Одночастотный |
Многочастотный |
|
Частота |
До 14 Гц |
До 20 Гц* |
*Текущая частота — 10 Гц, частота 20 Гц будет доступна после обновления прошивки.
Поставляется с приложением ReachView 3
Самое дружественное к пользователю программное обеспечение для сбора данных ReachView 3 доступно для устройств на платформах iOS и Android. Поддерживает тысячи систем координат, интерфейс переведён на несколько языков. Используя это приложения, вы сможете собирать и привязывать координаты точек и управлять всеми функциями приёмников Reach, такими как установка базовой станции, запись данных RINEX и конфигурация выхода NMEA.
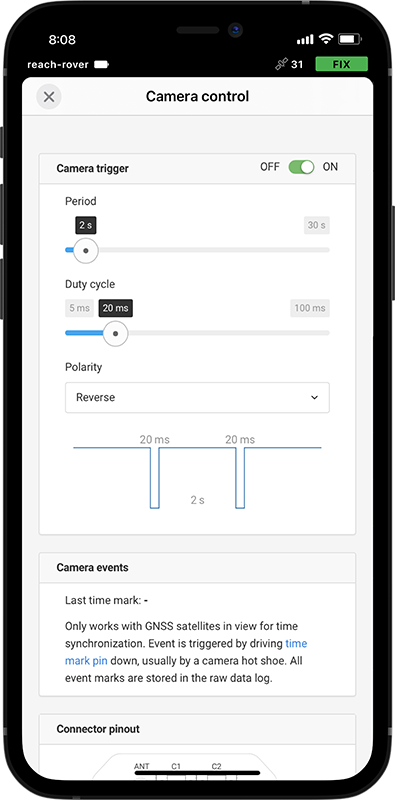
Управление камеройReach может как активировать затвор камеры, так и записывать события. Функция записи момента съёмки необходима для топографической аэрофотосъёмки, а также точного позиционирования и геопривязки каждого из полученных снимков. |
|
|
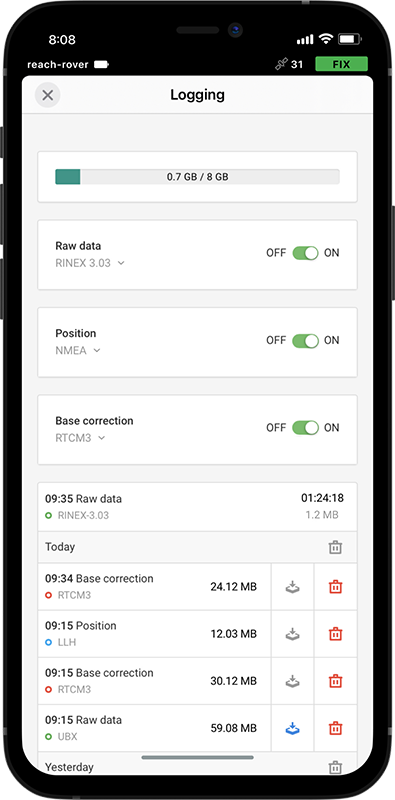
Простой менеджер логовЛоги автоматически записываются непосредственно в файл RINEX во встроенной памяти устройства. Просматривайте журнал логов и скачивайте необходимые данные при помощи приложения ReachView. |
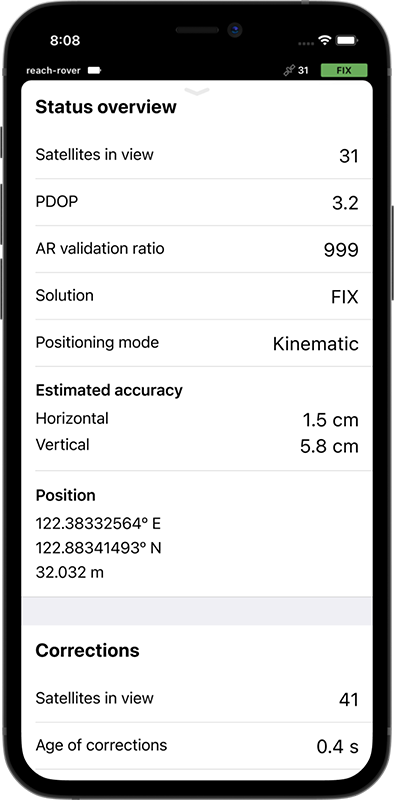
Мониторинг данныхReachView показывает уровень сигнала от систем навигации, количество доступных спутников, ваше положение на карте и множество другой необходимой и полезной для работы информации. |
|
Reach в действии: реальные случаи применения
|
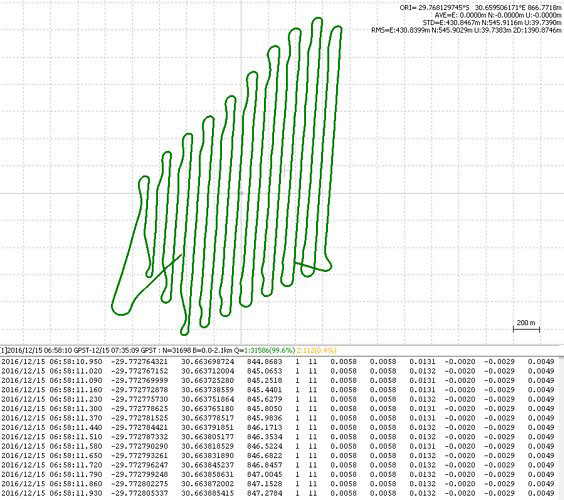
3DroneMapping завершает испытания PPK-решения с нулевой погрешностью по всем осям На первой стадии испытаний отклонение составляло не более 0,09 м по всем осям. Это невероятный результат, учитывая тот факт, что средний размер пикселя полученного изображения составлял 0,045 м. Средняя погрешность по всем осям не превышает несколько миллиметров! Люк Вижнберг, 3DroneMapping |
|
|
Tuffwing получает точность 4 см без опорных точек с Emlid Reach RTK Компания Tuffwing недавно представила решение с оборудованием Emlid Reach RTK, позволяющее строить карты без использования опорных точек. В ходе тестов модель с прямой геопривязкой сравнивалась с набором опорных точек, используемых исключительно для проверки результатов. Латеральная среднеквадратическая ошибка составила всего 4 см, согласно отчёту о качестве Pix4D. Брайан Кристал, Tuffwing |
|
|
Event38 интегрирует Emlid Reach и начинает поставки готового к использованию PPK-решения для картографии В ходе исследований специалисты компании построили ортомозаику с использованием Drone Data Management System™ со среднеквадратической ошибкой 2,45 см по горизонтали и 5,08 см по вертикали, что сравнимо с результатами использования наземных индустриальных GPS-приёмников для геодезии. Джефф Тейлор, Event38 |

|
Возможна поставка комплексного решения для геодезии и картографии с использованием БПЛА на базе EMLID Reach

Общие
|
Габаритные размеры |
56,4 x 45,3 x 14,6 мм |
| Вес | 35 г |
| Диапазон рабочей температуры | -20...+65 °C |
Точность позиционирования
| Статическая по горизонтали |
5 мм + 1 мд (M+) 4 мм + 0,5 мд (M2) |
| Статическая по вертикали |
10 мм + 2 мд (M+) 8 мм + 1 мд (M2) |
| Кинематическая по горизонтали |
7 мм + 1 мд (M+) 7 мм + 1 мд (M2) |
| Кинематическая по вертикали |
14 мм + 2 мд (M+) 14 мм + 1 мд (M2) |
Подключение
| Радиомодуль LoRa (докупается отдельно) |
Частотный диапазон: 868/915 МГц; Мощность: 0,1 Вт; Дальность: до 8 км. |
| Wi-Fi |
802.11 b/g/n |
| Bluetooth | 4.0/2.1 EDR |
| Разъёмы | USB, UART, Event |
Данные
| Коррекция | NTRIP, VRS, RTCM3 |
| Выход данных позиционирования | NMEA, LLH/XYZ |
| Запись данных |
RINEX 14 Гц (M+) 20 Гц (M2)* |
| Внутренняя память |
8 Гб (M+) 16 Гб (M2) |
GNSS
| Принимаемые сигналы |
GPS/QZSS L1, GLONASS G1, BeiDou B1, Galileo E1, SBAS (M+) GPS/QZSS L1C/A, L2C GLONASS L1OF, L2OF BeiDou B1I, B2I Galileo E1-B/C, E5b (M2) |
| Количество каналов |
72 (M+) 184 (M2) |
| Частота обновления |
RINEX 14 Гц GPS/ 5 Гц ГНСС (M+) 20 Гц GPS/ 10 Гц ГНСС* (M2) |
| IMU | 9DOF |
Питание
| Входное напряжение через USB и JST GH | 4,75-5,5 В |
| Питание антенны (постоянный ток) | 3,3 В |
| Среднее потребление тока (при 5 В) | 200 мА |
В комплекте:*
- Бортовой GNSS-модуль — 1 шт.
- Micro-USB кабель — 1 шт.
- Кабель с 6-пиновым разъёмом JST-GH — 1 шт.
- Кабель с 5-пиновым разъёмом JST-GH — 1 шт.